नियंत्रण सिद्धान्त
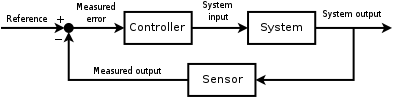
नियंत्रण सिद्धान्त (Control theory), इंजिनियरी और गणित का सम्मिलित (interdisciplinary) शाखा है जो गतिक तन्त्रों के व्यवहार को आवश्यकता के अनुरूप बदलने से सम्बध रखती है। वांछित ऑउटपुट को सन्दर्भ (रिफरेंस) कहते हैं।
नियंत्रण सिद्धान्त के तीन स्तम्भ
१) तन्त्र की मॉडलिंग करना
२) विश्लेषण (मुख्यतः स्थायित्व (stability) का विश्लेषण)
३) नियंत्रक तंत्र की डिजाइन
नियंत्रण सिद्धान्त के प्रभाग
१) पुरातन नियंत्रण सिद्धान्त (क्लासिकल कन्ट्रोल थिअरी)
२) आधुनिक नियंत्रण सिद्धान्त
३) उत्तर-आधुनिक नियंत्रण सिद्धान्त
४) बुद्धिपूर्ण नियंत्रण (Intelligent control)
५) फजी कंट्रोल (Fuzzi control)
क्लासिकल एवं आधुनिक नियंत्रण सिद्धान्त
| क्लासिकल और आधुनिक नियंत्रण सिद्धान्त की तुलना | |||
| विषय | क्लासिक | आधुनिक | |
| इनपुट और आउटपुट की संख्या | एक इन्पुट, एक आउटपुट (SISO) | अनेक इन्पुट, अनेक आउटपुट (MIMO) | |
| रैखिकता | अनिवार्यतः रैखिक प्रणालियाँ | प्रायः अरैखिक प्रणालियाँ | |
| समय के साथ परिवर्तनशीलता | समय के साथ अपरिवर्तनशील तंत्र | समय के साथ परिवर्तनशील तंत्र (time-varying systems) | |
| वर्णन का मुख्य उपकरण | ट्रांसफर फंक्शन | अवस्था समीकरण (स्टेट इक्वेशन) (सदिश, मैट्रिकस, बीजीय समीकरण) | |
| क्षेत्र | आवृत्ति डोमेन में | टाइम डोमेन में | |
| मुख्य लक्ष्य | सिस्टम का रिस्पांस | सिस्टम का स्टेट | |
| मौलिक कार्य करने वाले लोग | लियापुनोव (1892) - स्थायित्व सिद्धांत, एडवर्ड जॉन रूथ (1884), एडॉल्फ हर्विट्ज (1895) - स्थायित्व का बीजगणितीय मानदण्ड, हेनरी नाइक्विस्ट (1932) बोडे और निकोल्स (1927) - फ्रेक्वेंसी डोमेन में विश्लेषण, वाल्तर इवांस (Evans 1948) | नॉर्बर्ट विनर (Wiener) (1949) - इष्टतम डिजाइनिंग, Pontriagin - (1956, 1962 publ) अधिकतम सिद्धांत, बेलमैन (1957) - गतिशील प्रोग्रामिंग, कलमान (Kalman) (1960) | |
सन्दर्भ
इन्हें भी देखें
- नियंत्रण सिद्धान्त का इतिहास
- फीडफॉरवर्ड नियंत्रण
- स्वचालन (Automation)
- पीआईडी नियंत्रक
- प्रक्रिया नियंत्रण (Process control)
- पुनर्भरण (Feedback)